DisCoBoard
Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation
Start: 12.2021
Ende: 11.2024
Das FZI entwickelt in enger Kooperation mit Universal Robots (UR) seit 2018 den ROS-Treiber der UR-Roboterarme und trägt damit zu einer zuverlässigen und robusten Nutzbarkeit der Roboter bei. Der Treiber wurde mit weiteren Partnern gemeinsam auch auf ROS 2 portiert.
Die Kooperation hat viele inhaltliche Neuerungen in die ROS-Welt eingebracht.
Beispiele dafür sind:
Das FZI ist darüber hinaus für die Maintenance der C++-Bibliothek für die UR-Roboter, die ROS & ROS 2 Treiber, die Gazebo Classic und Gazebo Sim Simulations-Pakete sowie die verfügbaren Tutorials zuständig. Durch die direkte Unterstützung des Herstellers ist das FZI sowohl in der Lage hochqualitative Software zu entwickelnd und für die Community bereit zu stellen als auch innovative, anwendungsnahe Features zu entwickeln

Das Hauptaugenmerk des FZI in diesem Forschungsschwerpunkt liegt auf der praxisnahen Erforschung der Schlüsseltechnologie Künstliche Intelligenz (KI). Innovative KI-Lösungen werden entwickelt und für unserer Partner und Kunden in Anwendungsbereiche wie Mobilität, Robotik, Gesund¬heitstechnik, Logistik, Produktion sowie Ver- und Entsorgung transferiert.

Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation

Automatisierte Modellierung und Analyse durch intelligente Netzalgorithmen und Graphenmethoden

Das FZI entwickelt den ROS-Treiber für Universal Robots.

Deutsch-Israelische Forschungsinitiative zur Digitalen Demokratie
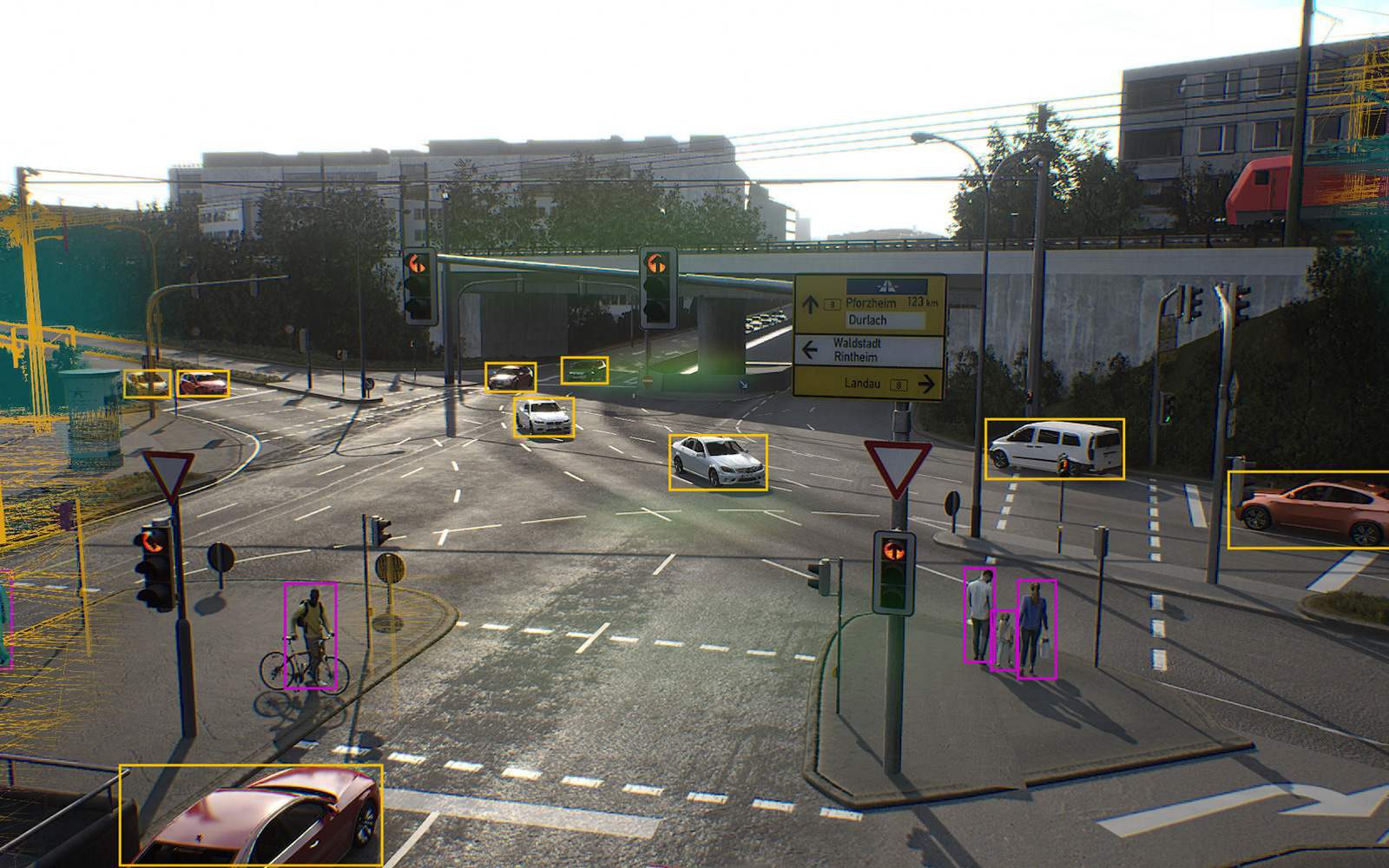
Einsatz von Künstlicher Intelligenz in Verkehrssystemen
Die Supercomputing-Plattform für hochautomatisierte Fahrzeuge

Cybersicherheit für den Mittelstand

Repositorium zur Datenverwaltung für pflegeunterstützende KI-Anwendungen

Innovation mit Cybersicherheit für KMU in Baden-Württemberg

Statische Hardware-/Softwareanalysen im Kontext skalierbarer Edge-Computing- Plattformen
Das Hauptaugenmerk des FZI in diesem Forschungsschwerpunkt liegt auf der praxisnahen Erforschung der Schlüsseltechnologie Künstliche Intelligenz (KI). Innovative KI-Lösungen werden entwickelt und für unserer Partner und Kunden in Anwendungsbereiche wie Mobilität, Robotik, Gesund¬heitstechnik, Logistik, Produktion sowie Ver- und Entsorgung transferiert.