DisCoBoard
An AI Dashboard Helping Youth Uncover Online Disinformation
Individual mobility is a critical factor for the economic success of a society. It is particularly important for fostering the compatibility of career and family.
Currently, private cars are seen as the only mode of transportation suitable for both complex and flexible daily routines. This is partly an acceptance and perception problem over alternative modes of transportation as well as multimodal mobility. These are often viewed as unreliable alternatives. Today, mobility and route planning only takes place in the context of the primary mode of transportation. Alternative modes of transportation are only considered for the last mile.
The MobAPlan project aims to show the technical feasibility of the integrated planning of daily activities together with the resulting mobility demand. A planning assistant (MobAPlan) will be designed and implemented as a prototype to support users in planning their daily activities, while considering their individual mobility preferences and health goals.

Smart solutions for the transportation of people and goods are a focus of FZI research to shape mobility in the future. To this end, the FZI develops integrated mobility systems – from vehicle automation and the application of AI in traffic systems to urban mobility and logistics.

An AI Dashboard Helping Youth Uncover Online Disinformation

Research Projects Back to the overview AMAZING Automated Modelling, Analysis and State Estimation via Intelligent Network Algorithms and Graph Methods Start: 10.2024 End: 09.2027 The energy transition presents electricity grid…

The FZI develops ROS driver for Universal Robots

German-Israeli Research Initiative on Digital Democracy
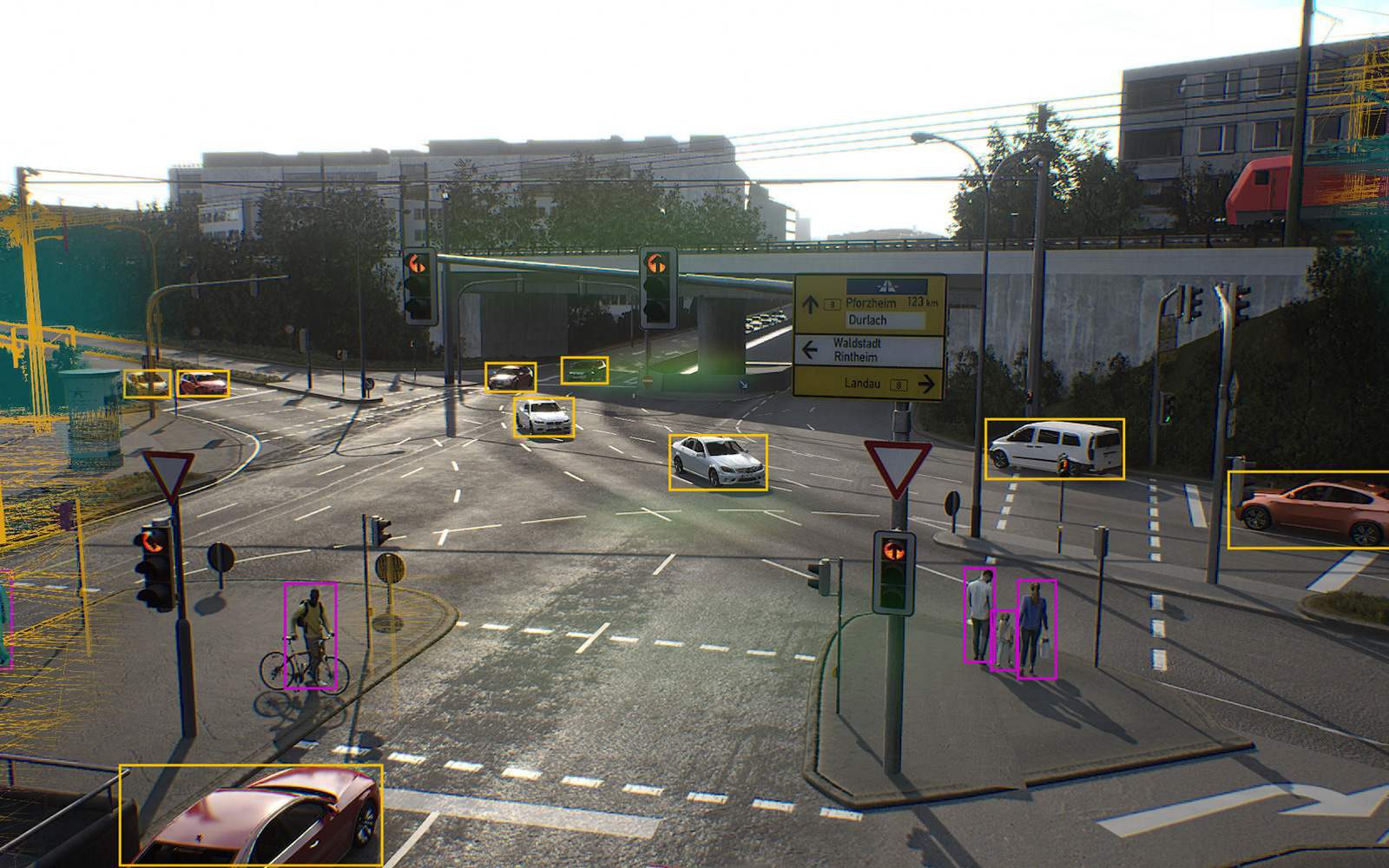
Artificial Intelligence in Traffic Systems
Supercomputing Platform for Highly Automated Vehicles

Cybersecurity for SMEs

Data management repository for care-supporting AI applications

Innovation with Cybersecurity for SMEs in Baden-Württemberg

Hardening of embedded RISC-V software by means of code transformations