DisCoBoard
An AI Dashboard Helping Youth Uncover Online Disinformation
Start: 12.2021
End: 11.2024
In close cooperation with Universal Robots (UR), the FZI has been developing the ROS driver for the UR robot arms since 2018, thus contributing to the reliable and robust usability of the robots. Together with other partners, the driver was also ported to ROS 2.
The cooperation has brought many content innovations to the ROS world.
Examples include:
The FZI is also responsible for the maintenance of the C++ library for the UR robots, the ROS & ROS 2 drivers, the Gazebo Classic and Gazebo Sim Simulation packages as well as the available tutorials. Through direct support from the manufacturer, the FZI can not only develop high-quality software and make it available to the community, but also develop innovative, application-oriented features.

In this research focus, the FZI concentrates on practical research into the key technology of Artificial Intelligence (AI). Innovative AI solutions are developed and transferred to application areas such as mobility, robotics, healthcare technology, logistics, production, and supply and disposal on behalf of our partners and customers.

An AI Dashboard Helping Youth Uncover Online Disinformation

Research Projects Back to the overview AMAZING Automated Modelling, Analysis and State Estimation via Intelligent Network Algorithms and Graph Methods Start: 10.2024 End: 09.2027 The energy transition presents electricity grid…

The FZI develops ROS driver for Universal Robots

German-Israeli Research Initiative on Digital Democracy
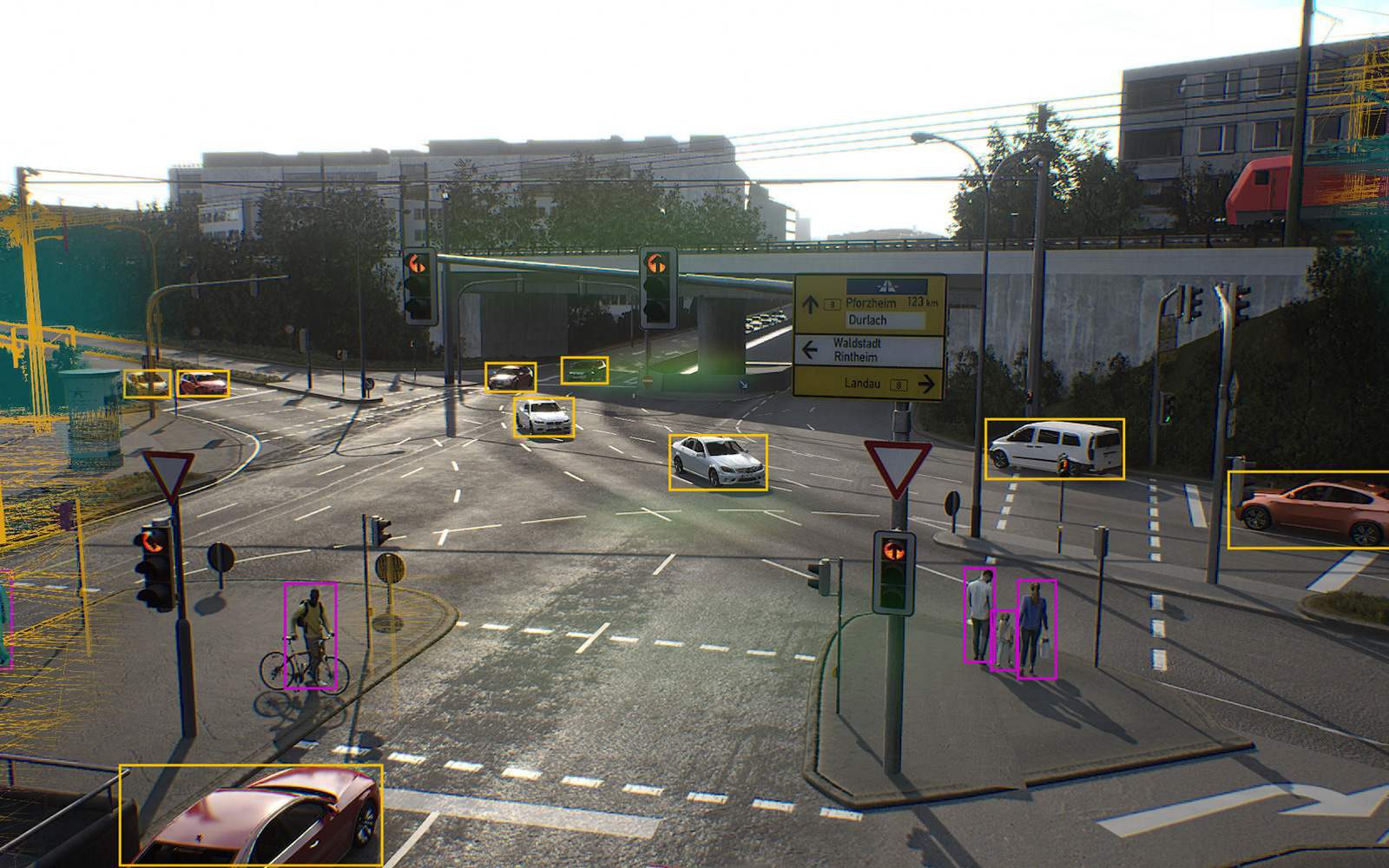
Artificial Intelligence in Traffic Systems
Supercomputing Platform for Highly Automated Vehicles

Cybersecurity for SMEs

Data management repository for care-supporting AI applications

Innovation with Cybersecurity for SMEs in Baden-Württemberg

Hardening of embedded RISC-V software by means of code transformations
In this research focus, the FZI concentrates on practical research into the key technology of Artificial Intelligence (AI). Innovative AI solutions are developed and transferred to application areas such as mobility, robotics, healthcare technology, logistics, production, and supply and disposal on behalf of our partners and customers.