

{kind=link}
DisCoBoard
An AI Dashboard Helping Youth Uncover Online Disinformation
Start: 08/2021
End: 07/2024
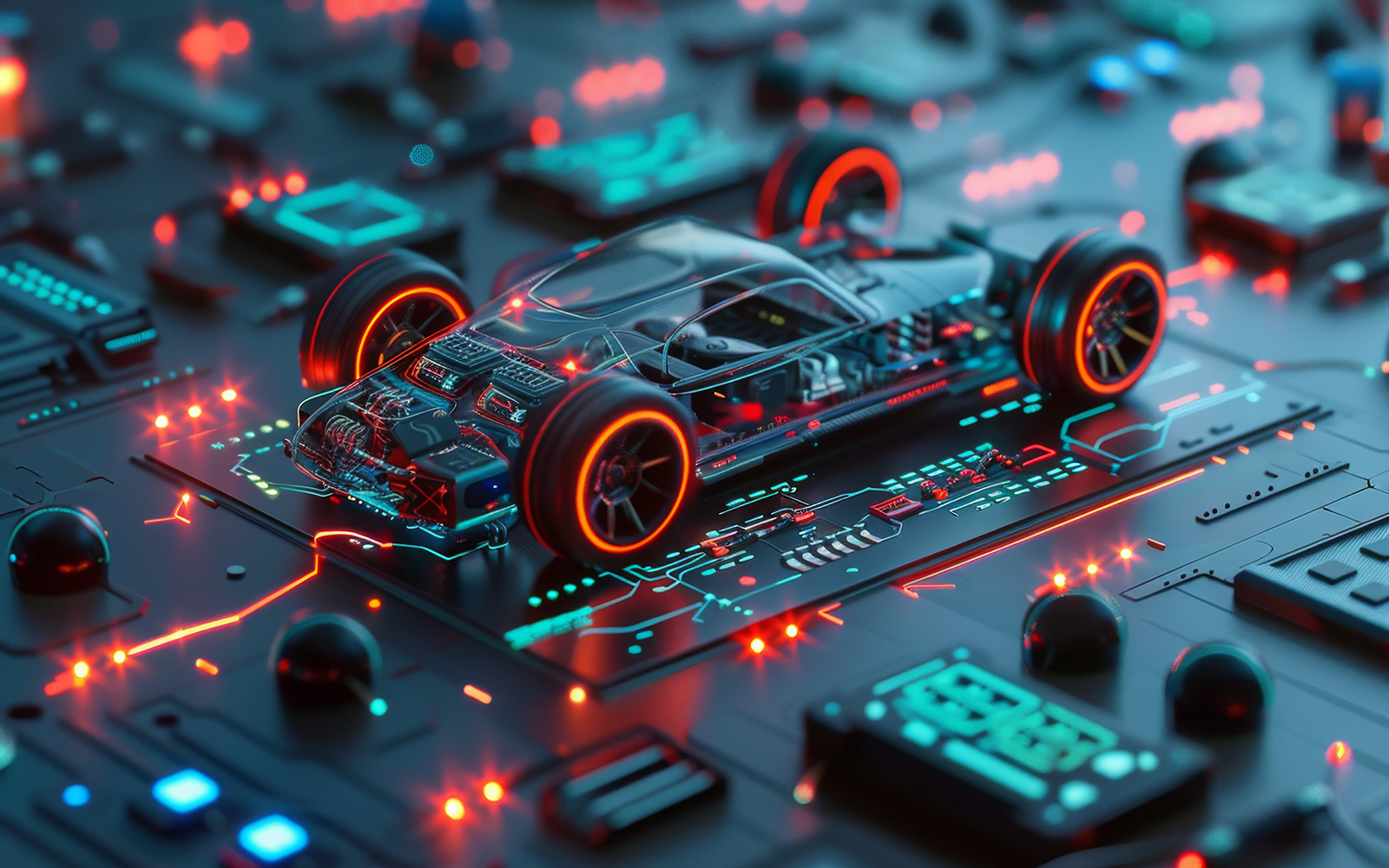
All SofDCar Alliance project partners are focusing their research on the challenges of future E/E & SW architecture in vehicles. The vehicle is understood as part of a networked vehicle and system environment. Its integration will be enabled by means of a “Data Loop” and based on a new type of “Digital Twin” to allow for digital sustainability (of existing and future vehicle generations) as well as efficient data use and innovative use cases over the entire life cycle of the vehicle (re-deployment).
The FZI is contributing its extensive research expertise in the field of mobility. The focus of SofDCar is on validating, verifying, and maintaining the consistency of vehicle variants, recognizing limitations and weaknesses in the driving function, evolving both variants and individual functionalities, and managing the resulting versions with the help of the digital twin. The spotlight is also on quality-assured application processes across vehicle boundaries. In addition, applied IT security issues such as the security assurance of vehicle components will be studied using Artificial Intelligence methods, including practical security tests on selected components. In the Test Area Autonomous Driving Baden-Württemberg (TAF BW), various aspects of software-over-the-air updates, validation, and increased robustness are being tested.
This project is part of a government-sponsored research program funded by the Federal Ministry for Economic Affairs and Climate Action (BMWK).

Smart solutions for the transportation of people and goods are a focus of FZI research to shape mobility in the future. To this end, the FZI develops integrated mobility systems – from vehicle automation and the application of AI in traffic systems to urban mobility and logistics.

Funding notice:
The SofDCar project is funded by the Federal Ministry for Economic Affairs and Climate Action (BMWK).

Project partners:
At the Karlsruhe Institute of Technology (KIT) and the FZI Research Center for Information Technology, we research concepts for developing and securing software-implemented functionality in vehicles and their cloud infrastructure. The focus is on security analyses, dealing with a high number of versions and variants, and over-the-air updates.
Together, we are examining various aspects of software-over-the-air, safeguarding, and robustness enhancement at the Autonomous Driving Test Field Baden-Württemberg. Our test vehicles are also used for this purpose. Our goal is to continuously improve the safety of AI-based functionalities, also with the valuable evaluation opportunities weaned from the test field.

An AI Dashboard Helping Youth Uncover Online Disinformation

Research Projects Back to the overview AMAZING Automated Modelling, Analysis and State Estimation via Intelligent Network Algorithms and Graph Methods Start: 10.2024 End: 09.2027 The energy transition presents electricity grid…

The FZI develops ROS driver for Universal Robots

German-Israeli Research Initiative on Digital Democracy
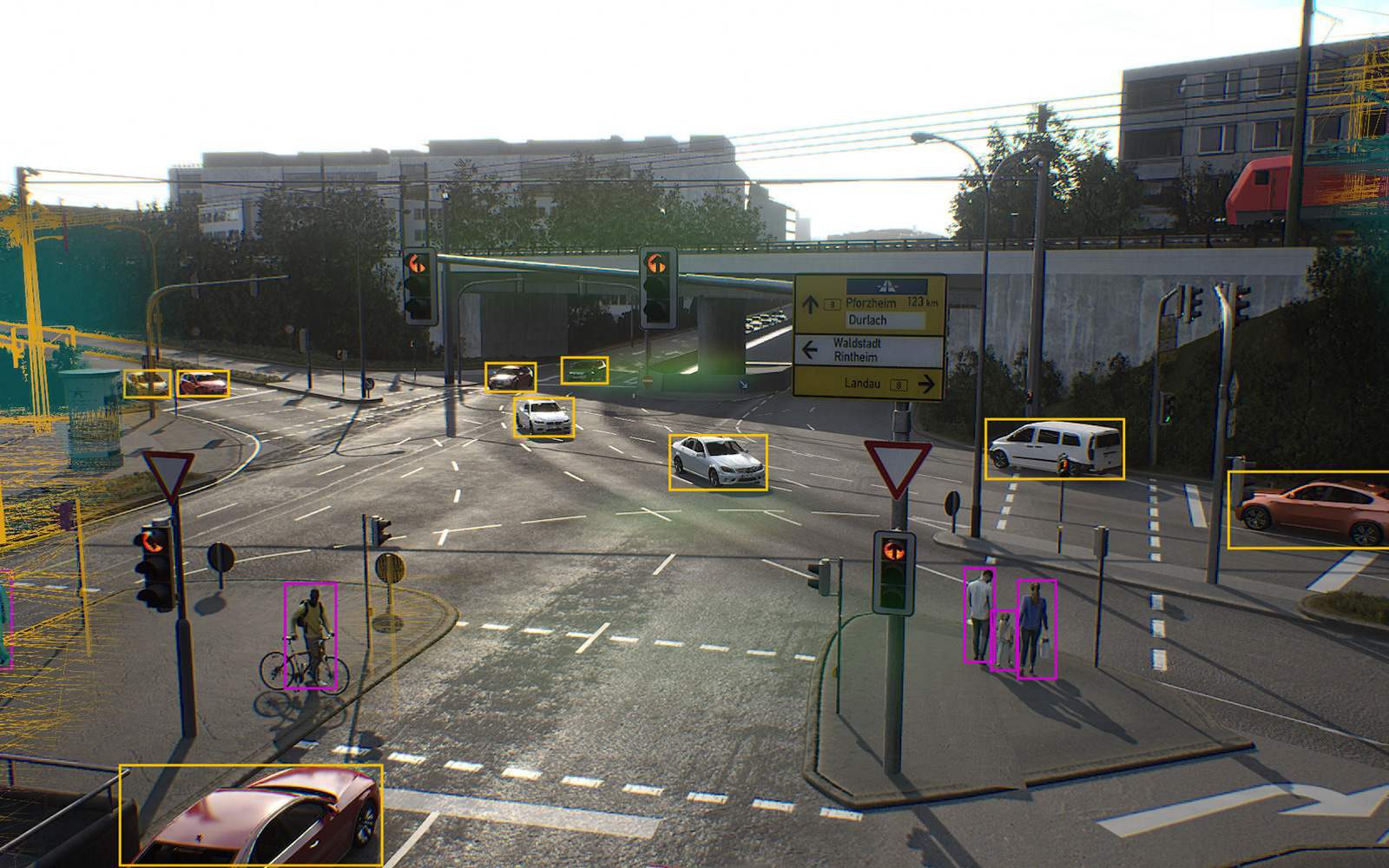
Artificial Intelligence in Traffic Systems
Supercomputing Platform for Highly Automated Vehicles

Cybersecurity for SMEs

Data management repository for care-supporting AI applications

Innovation with Cybersecurity for SMEs in Baden-Württemberg

Hardening of embedded RISC-V software by means of code transformations