


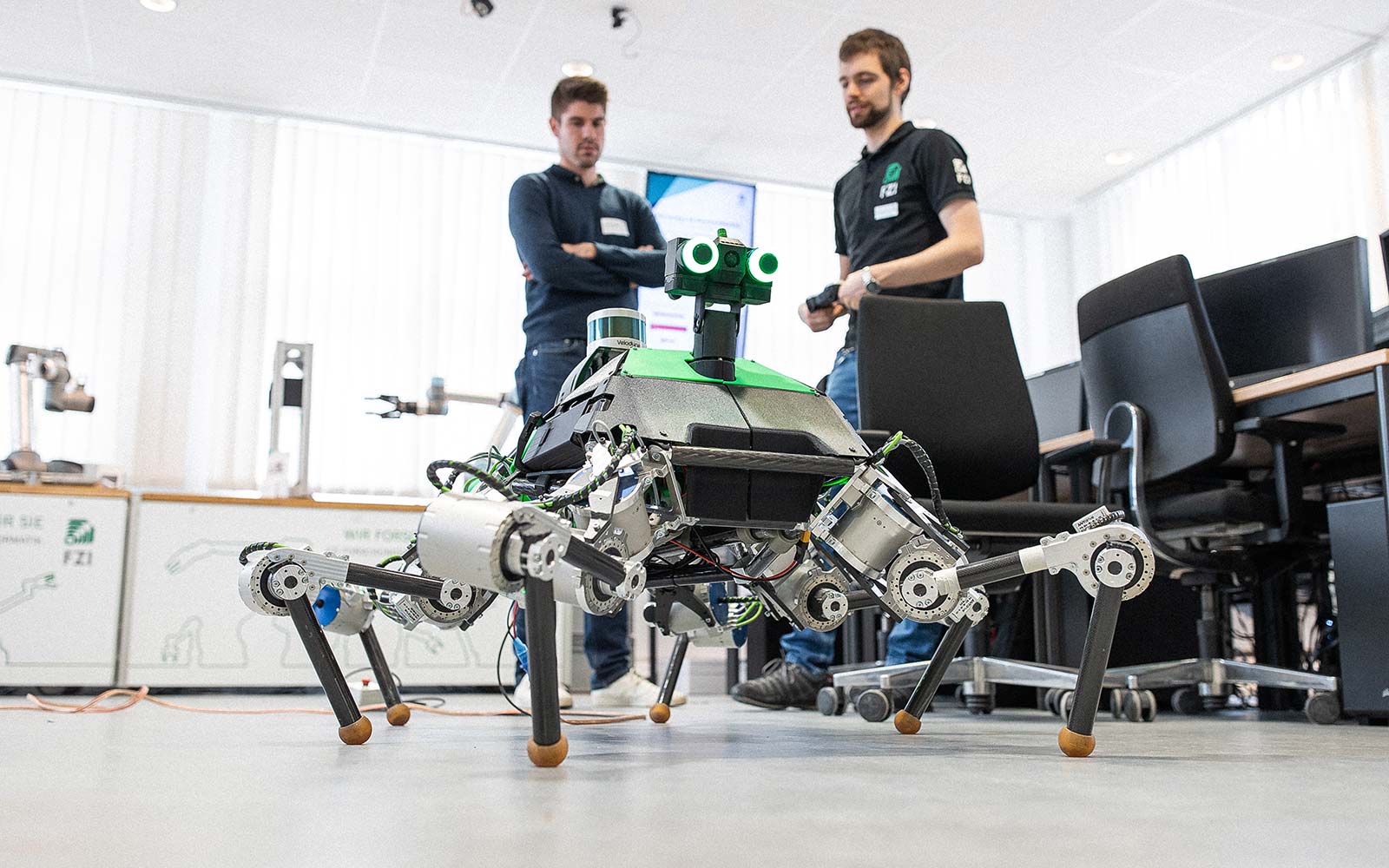
Seit den frühen neunziger Jahren befasst sich das FZI Forschungszentrum Informatik mit der Entwicklung intelligenter, mehrbeiniger Laufroboter: Was mit einem Prototyp aus Holz begann, ist heute der hochkomplexe, autonome Laufroboter LAURON V und VI. Der Name LAURON (LAUfender ROboter Neuronal gesteuert) stammt von der ersten Generation, die im Gegensatz zur aktuellen Generation noch mit neuronalen Netzen gesteuert wurde. Die sechsbeinige Kinematik erlaubt es biologische, insektenartige Laufansätze nachzubilden. Sie zeichnen sich durch robustes Laufen für anspruchsvolle Inspektionsaufgaben aus. 2024 wurde die sechste Generation der Öffentlichkeit präsentiert.
FZI-Eigenbau ohne
Vorgaben durch Dritte
Sensor- und Aktor-
Ausstattung individuell für
Einsatz und Anwendung
ROS 2 als Grundlage für flexible Steuerung und Anwendung
Nach dem Vorbild einer
Stabheuschrecke
statische Stabilität und Mobilität auch auf schwierigem Gelände
robustes Greifen und Bewältigung von starken Steigungen
Auswahlmöglichkeit für verschiedene Controller, passend zur Umgebung
spezifische Ausstattung für individuelle Inspektionsaufgaben
Als unabhängige Forschungseinrichtung unterstützt das FZI Forschungszentrum Informatik Sie bei der Lösung Ihrer Problemstellungen. Wir bieten
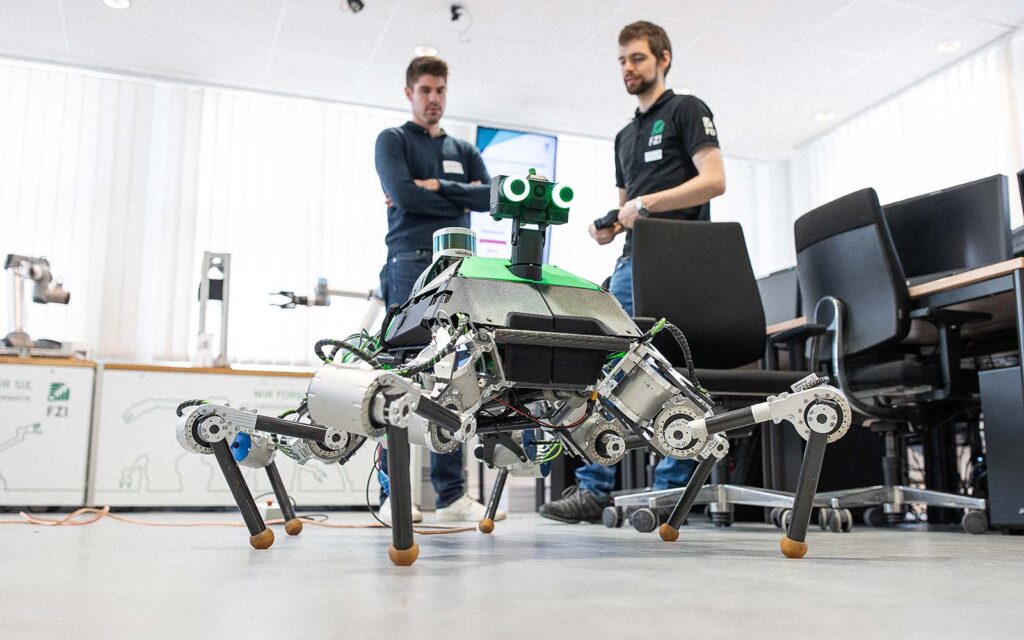
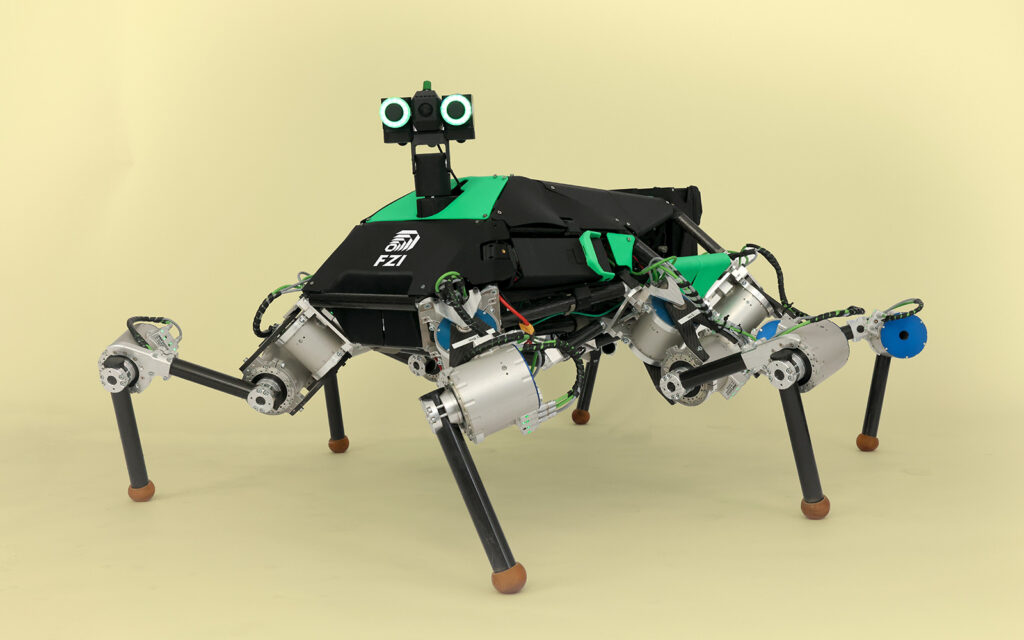
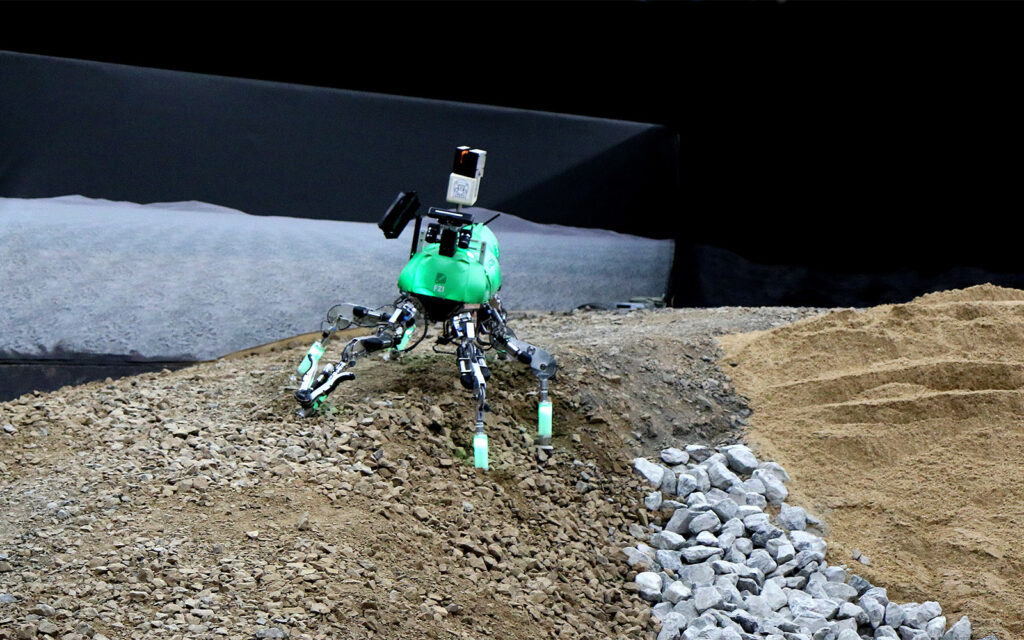
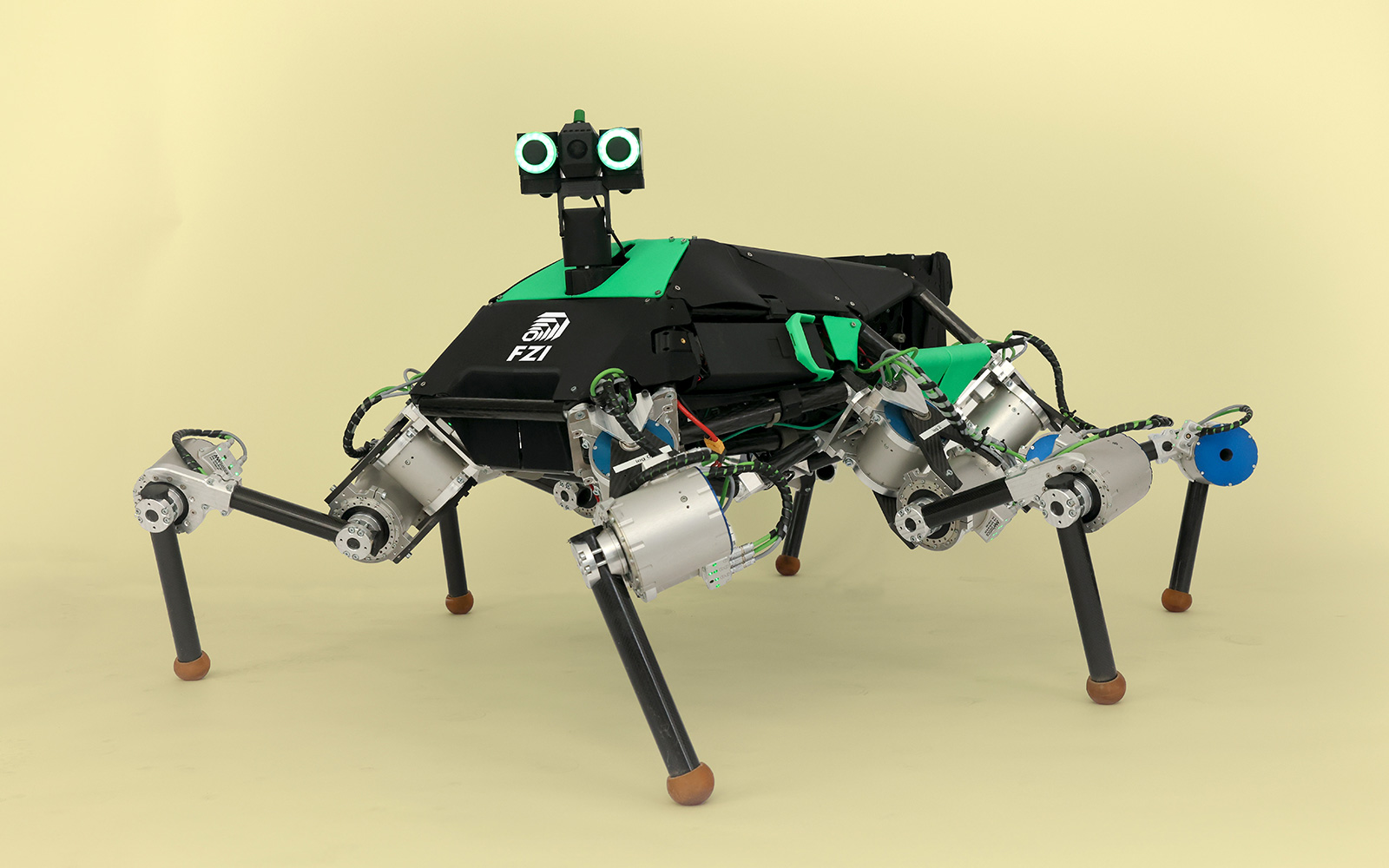
LAURON VI wird 2024 auf der CLAWAR-Konferenz präsentiert. Er verwendet spezielle drehmomentgeregelte Motoren, die mit einer elastischen Feder ausgestattet sind. Diese erlaubt es, harte Schläge abzufangen und den Roboter robuster zu machen. Ein Full-Body-Control-Ansatz sorgt dafür, dass der Roboter auch bei komplexen Manövern in schwierigem Gelände stabil bleibt. Mit der neuen LAURON-Generation wird dadurch eine adaptive Inspektionsplattform für anspruchsvolle Einsätze geschaffen.
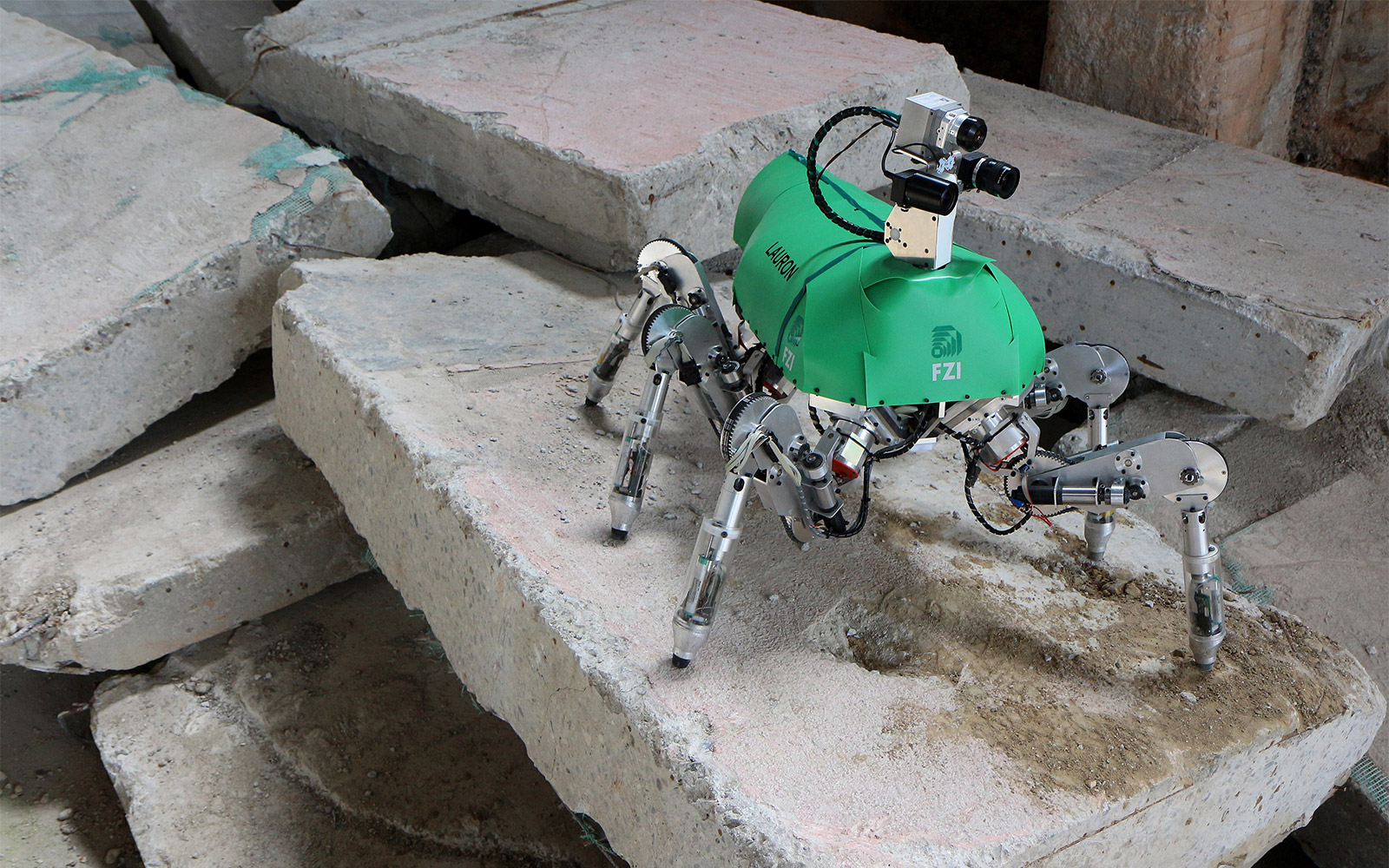
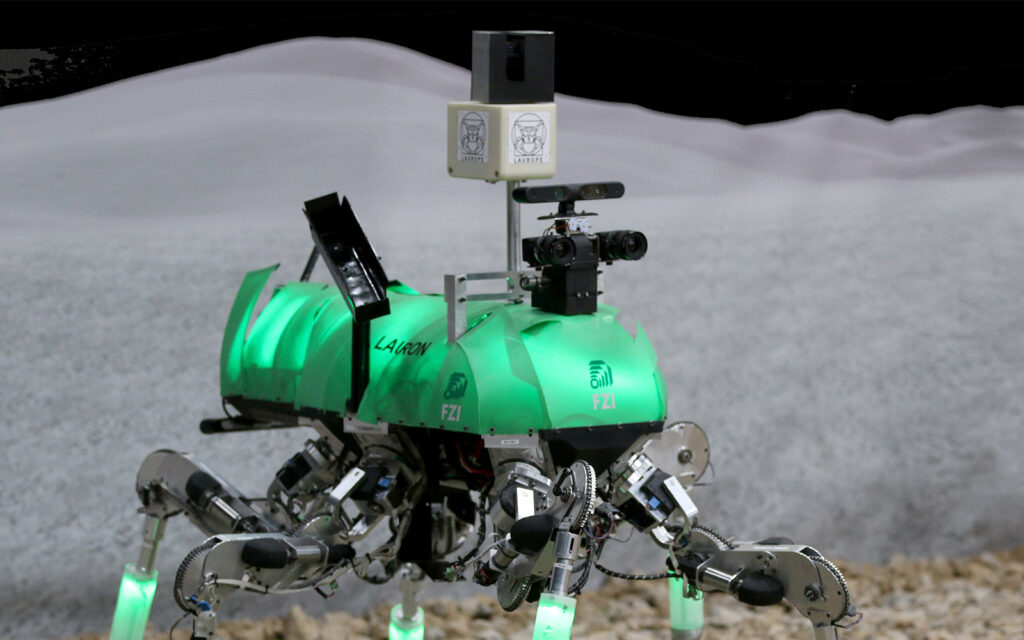
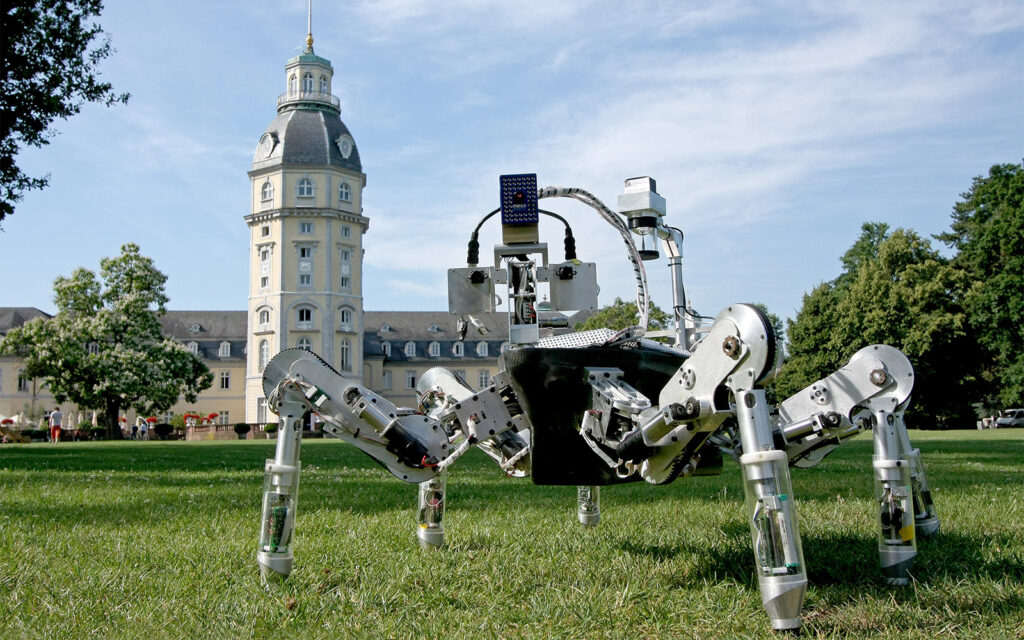
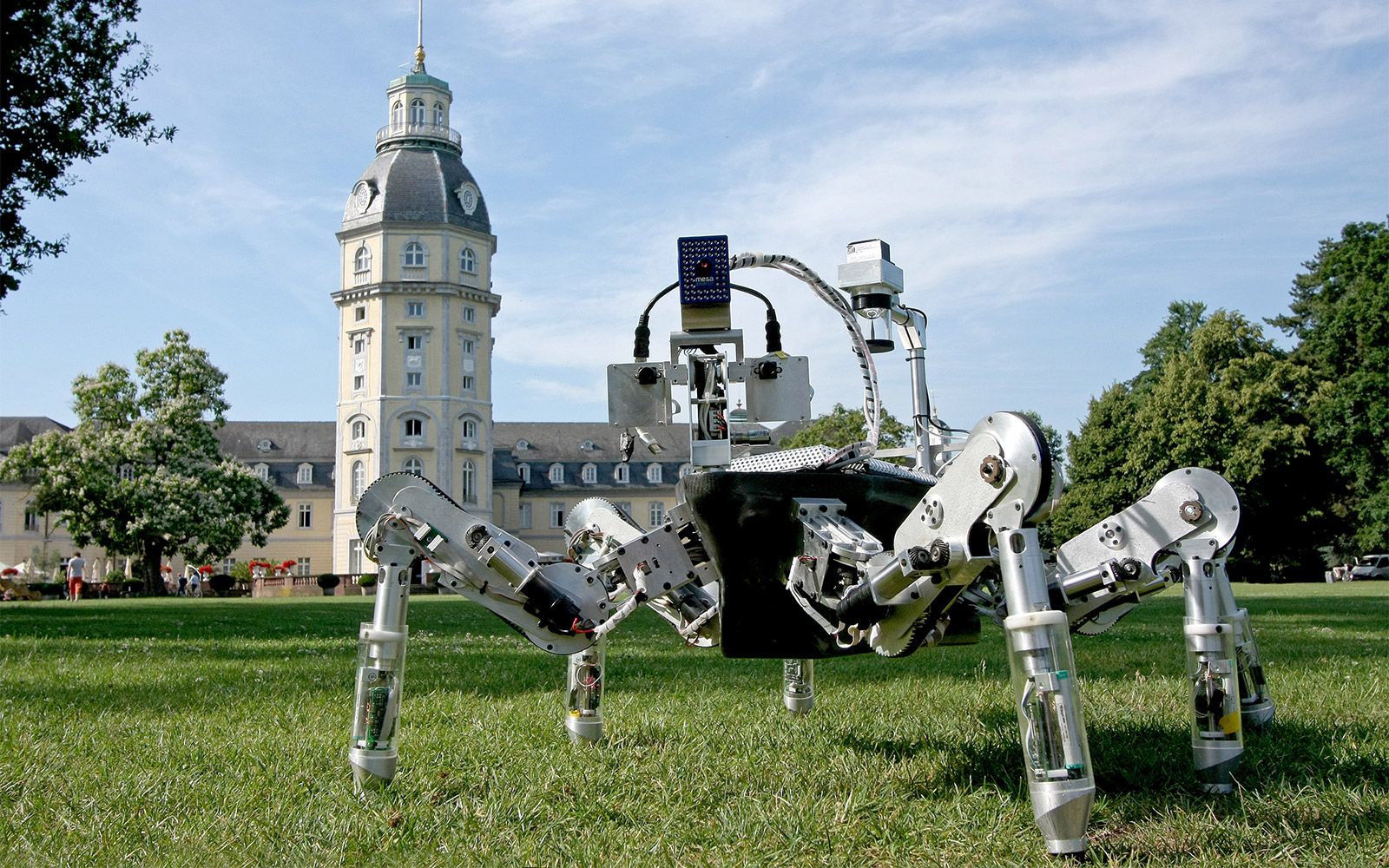
LAURON V wurde 2013 auf der IEEE Robotik-Konferenz ICRA vorgestellt. Die fünfte Generation zeichnet sich durch ein zusätzliches Rotationsgelenk aus. Die Kinematik ist dabei noch näher am biologischen Vorbild ausgerichtet und sorgt für eine sichere Fortbewegung. LAURON V ist für anspruchsvolle Inspektions-, Such- und Rettungsaufgaben einsetzbar, was unter anderem ab 2012 beim SpaceBot Cup des Deutschen Zentrums für Luft- und Raumfahrt (DLR) getestet wurde. Der Roboter befindet sich im FZI House of Living Labs und wird zu Forschungszwecken eingesetzt.
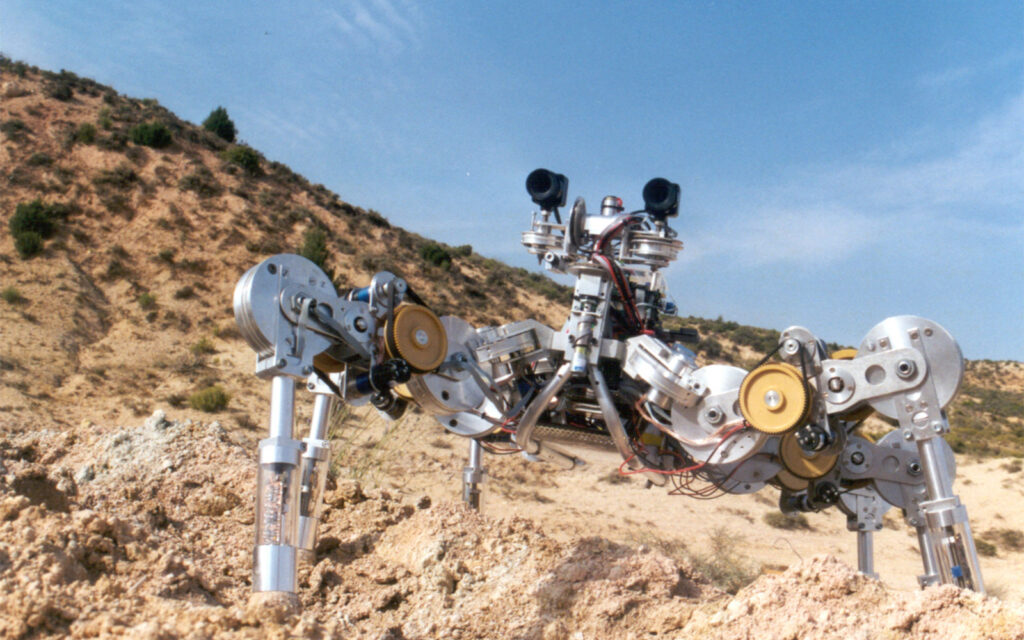
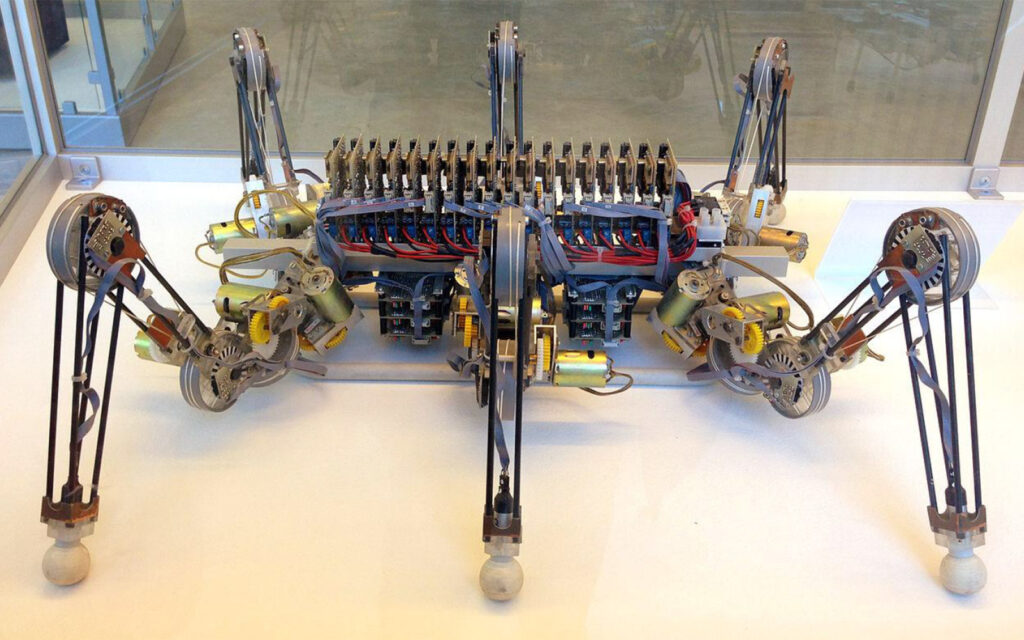
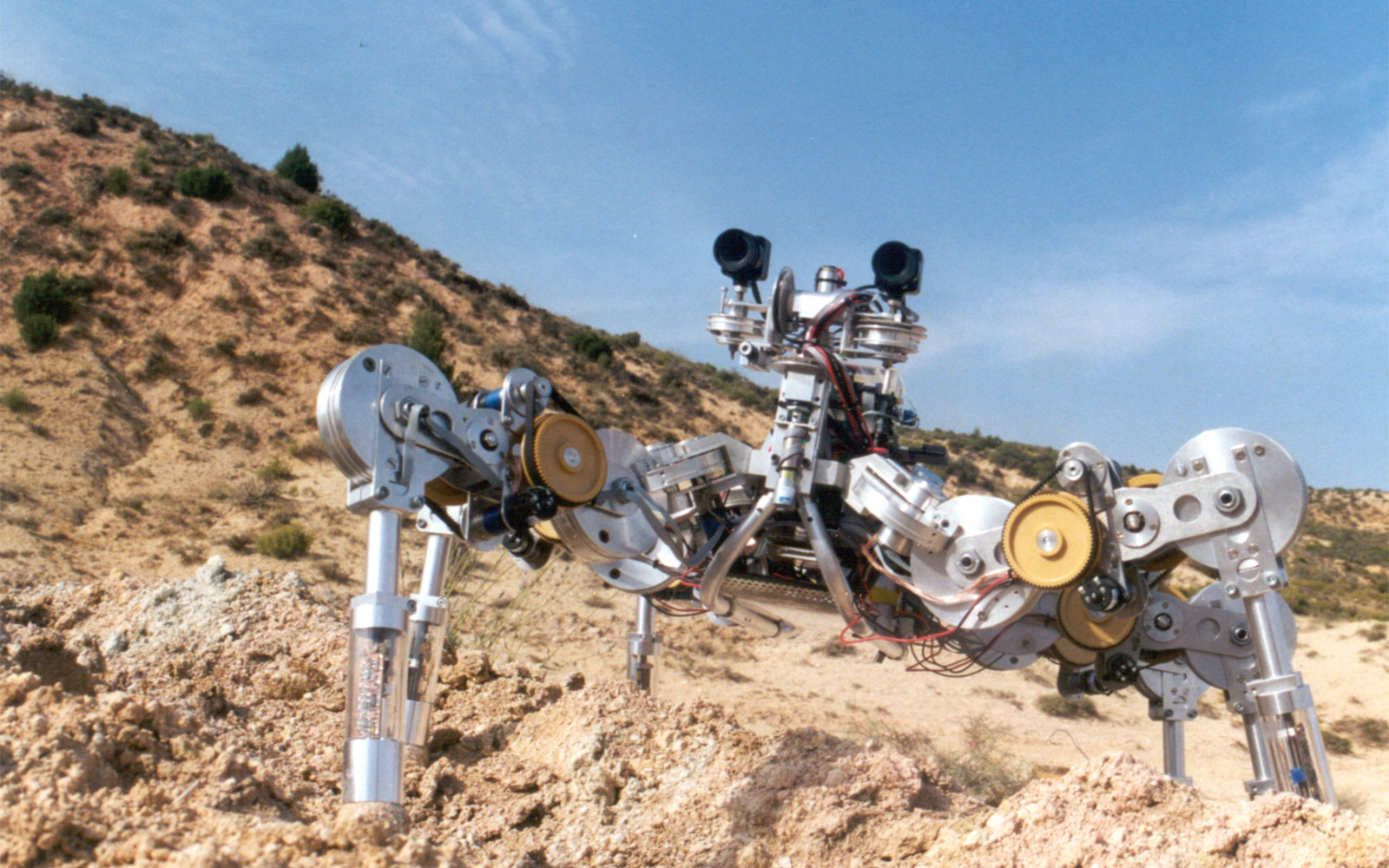
LAURON IV wurde 2004 entwickelt und zeichnet sich durch eine im Vergleich zum Vorgänger-Modell verbesserte Robustheit aus. Zahnriemen ersetzen die Seilzüge in den Beinen. Der Kopf umfasst zwei Freiheitsgrade. Der Zentralkörper besteht aus kohlenstofffaserverstärktem Kunststoff. Zwei Embedded-PCs und spezielle Motorsteuerungselektronik dienen der Steuerung. Von der Generation IV wurden drei Exemplare in Betrieb genommen. Sie befinden sich zurzeit in unterschiedlichen universitären Instituten und Museen in Europa.
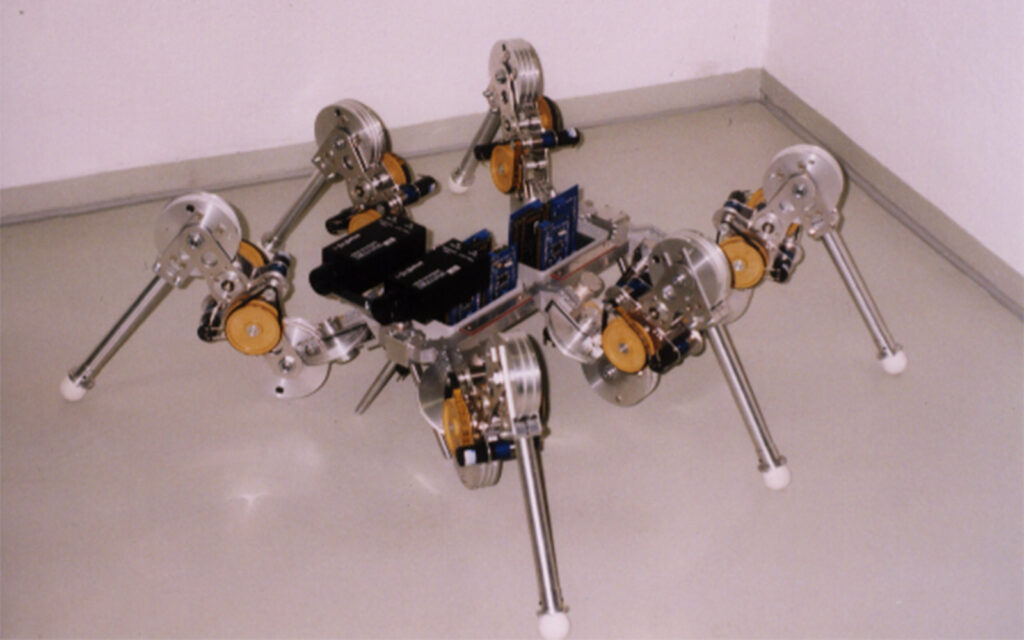
LAURON III stammt aus dem Jahr 1999. Die neuronalen Netze der vorherigen Generationen wurden hier durch eine modulare und reaktive Robotersteuerung ersetzt. Mit dieser Roboterversion wurde nicht nur das Laufen selbst, sondern auch die Lokalisierung, Navigation und Umweltmodellierung erforscht.Von dieser Generation wurden acht Robotersysteme gebaut und verkauft. Ein Exemplar befindet sich nach wie vor im FZI House of Living Labs, ein anderes beispielsweise im Technoseum in Mannheim.
LAURON II stammt aus dem Jahr 1994. Er zeichnete sich durch eine überarbeitete Konstruktion und zusätzliche Fußkraft- und Neigungssensoren aus. Aus Aluminium gefertigte, schwere Beine erhöhten das Gewicht des Roboters auf 16 Kilogramm. LAURON II diente als Testplattform für Regelungsstrategien und maschinelles Lernen.
Lauron I wurde 1994 auf der CEBIT der Öffentlichkeit vorgestellt. Sein Zentralkörper bestand aus Aluminium, die Beine aus faserverstärktem Kunststoff. Damit wog er circa 11 Kilogramm. Der Roboter wurde mit Hilfe von neuronalen Netzen gesteuert. Als biologische Inspiration diente die Stabheuschrecke. LAURON I ist heute im Besitz des Deutschen Museums in München.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}