

{kind=link}
DisCoBoard
Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation
Start: 08.2021
Ende: 07.2024
Die Projektpartner des SofDCar Konsortiums wollen neue Methoden und Prozesse für das Auto der Zukunft und seine effiziente Datennutzung entwickeln und forschen mit Blick auf zentrale Herausforderungen der künftigen E/E- & SW-Architektur in Fahrzeugen. Das Fahrzeug wird dabei als Teil einer vernetzten Fahrzeug- und Systemumgebung verstanden, dessen Einbindung mittels eines „Data Loop“ und auf Basis eines neuartigen „Digital Twin“ ermöglicht werden soll, um digitale Nachhaltigkeit (bestehender und künftiger Fahrzeuggenerationen) sowie eine effiziente Datennutzung und innovative Anwendungsfälle über den gesamten Lebenszyklus des Fahrzeugs hinweg zu ermöglichen (Re-Deployment).
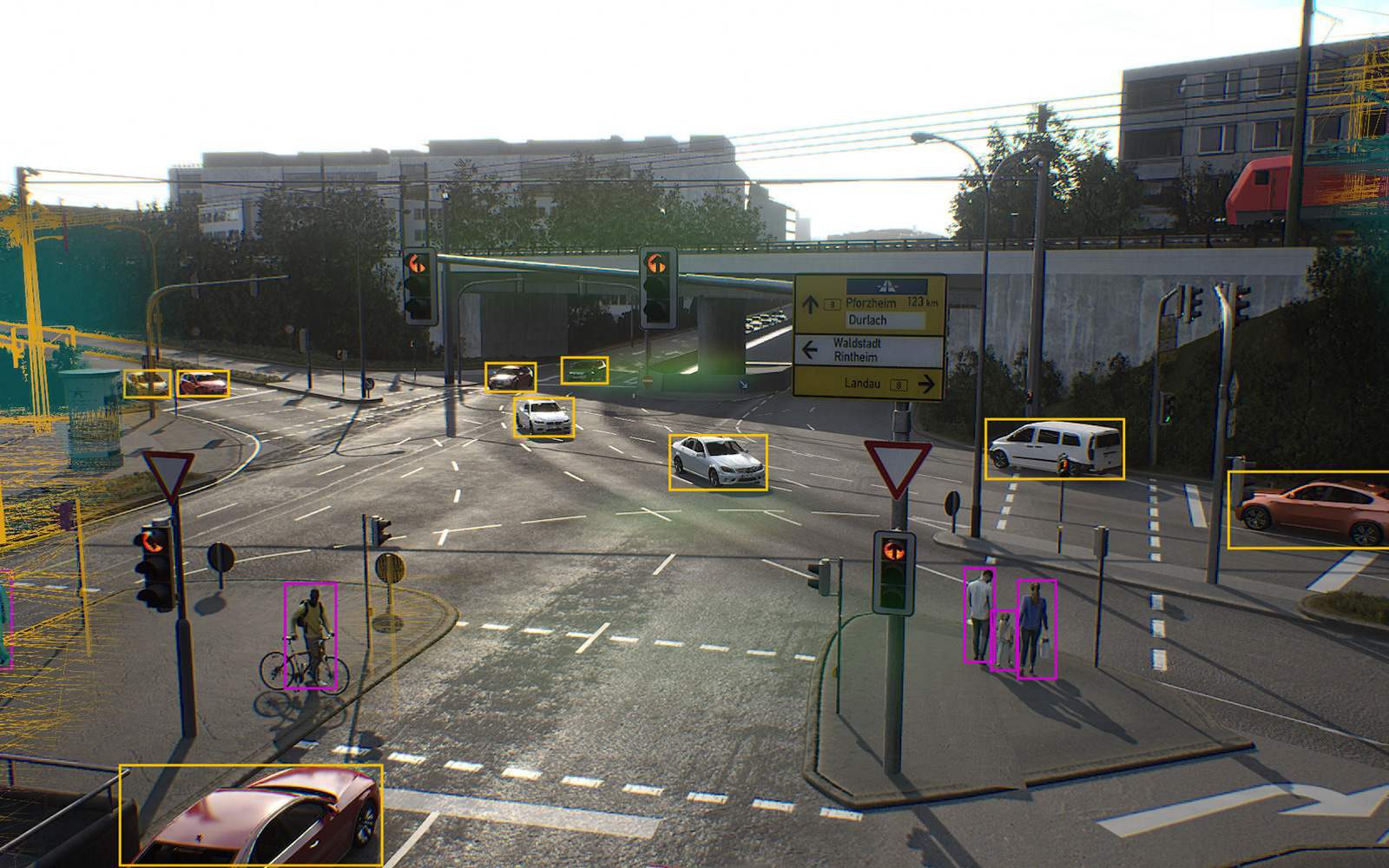
Das FZI bringt seine umfassende Forschungsexpertise im Bereich Mobilität ein. Schwerpunkt bei SofDCar sind die Absicherung, Verifikation und Konsistenzhaltung von Fahrzeugvarianten, das Erkennen von Einschränkungen und Schwachstellen in der Fahrfunktion, die Evolution sowohl von Varianten als auch einzelner Funktionalitäten sowie das Verwalten der entstehenden Versionen mit Hilfe des digitalen Zwillings. Darüber hinaus stehen auch qualitätsgesicherte Anwendungsprozesse über die Fahrzeuggrenzen hinweg im Fokus. Zusätzlich werden angewandte Fragestellungen zur IT-Sicherheit wie etwa die Security-Absicherung von Fahrzeugkomponenten mit Methoden der Künstlichen Intelligenz untersucht, auch mit praktischen Sicherheitstests an ausgewählten Komponenten. Auf dem Testfeld Autonomes Fahren Baden-Württemberg werden verschiedene Aspekte im Bereich Software-over–the-Air, Absicherung und Robustheitssteigerung erprobt.
Das Projekt wird mit Mitteln des Bundesministerium für Wirtschaft und Klimaschutz (BMWK) öffentlich gefördert.

Intelligente Lösungen für den Transport von Menschen und Gütern für die Mobilität der Zukunft stellen einen Schwerpunkt der FZI-Forschung dar. Dazu entwickelt das FZI integrierte Mobilitätssysteme – von der Fahrzeugautomatisierung über die Anwendung von KI in Verkehrssystemen bis zur urbanen Mobilität und Logistik.

Förderhinweis:
Das Projekt SofDCar wird vom Bundesministerium für Wirtschaft und Klimaschutz gefördert.

Projektpartner:
Gemeinsam erproben wir im Testfeld Autonomes Fahren Baden-Württemberg verschiedene Aspekte im Bereich Software-over-the-Air, Absicherung und Robustheitssteigerung. Hierbei kommen auch unsere Testfahrzeuge zum Einsatz. Unser Ziel ist es, die Sicherheit von KI-basierten Funktionalitäten laufend zu verbessern, auch mit den wertvollen Evaluierungsmöglichkeiten durch das Testfeld.

Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation

Automatisierte Modellierung und Analyse durch intelligente Netzalgorithmen und Graphenmethoden

Das FZI entwickelt den ROS-Treiber für Universal Robots.

Deutsch-israelische Forschungsinitiative zur Digitalen Demokratie
Einsatz von Künstlicher Intelligenz in Verkehrssystemen
Die Supercomputing-Plattform für hochautomatisierte Fahrzeuge

Cybersicherheit für den Mittelstand

Repositorium zur Datenverwaltung für pflegeunterstützende KI-Anwendungen

Innovation mit Cybersicherheit für KMU in Baden-Württemberg

Statische Hardware-/Softwareanalysen im Kontext skalierbarer Edge-Computing- Plattformen