Universal Robots ROS-Treiber
Das FZI entwickelt den ROS-Treiber für Universal Robots.
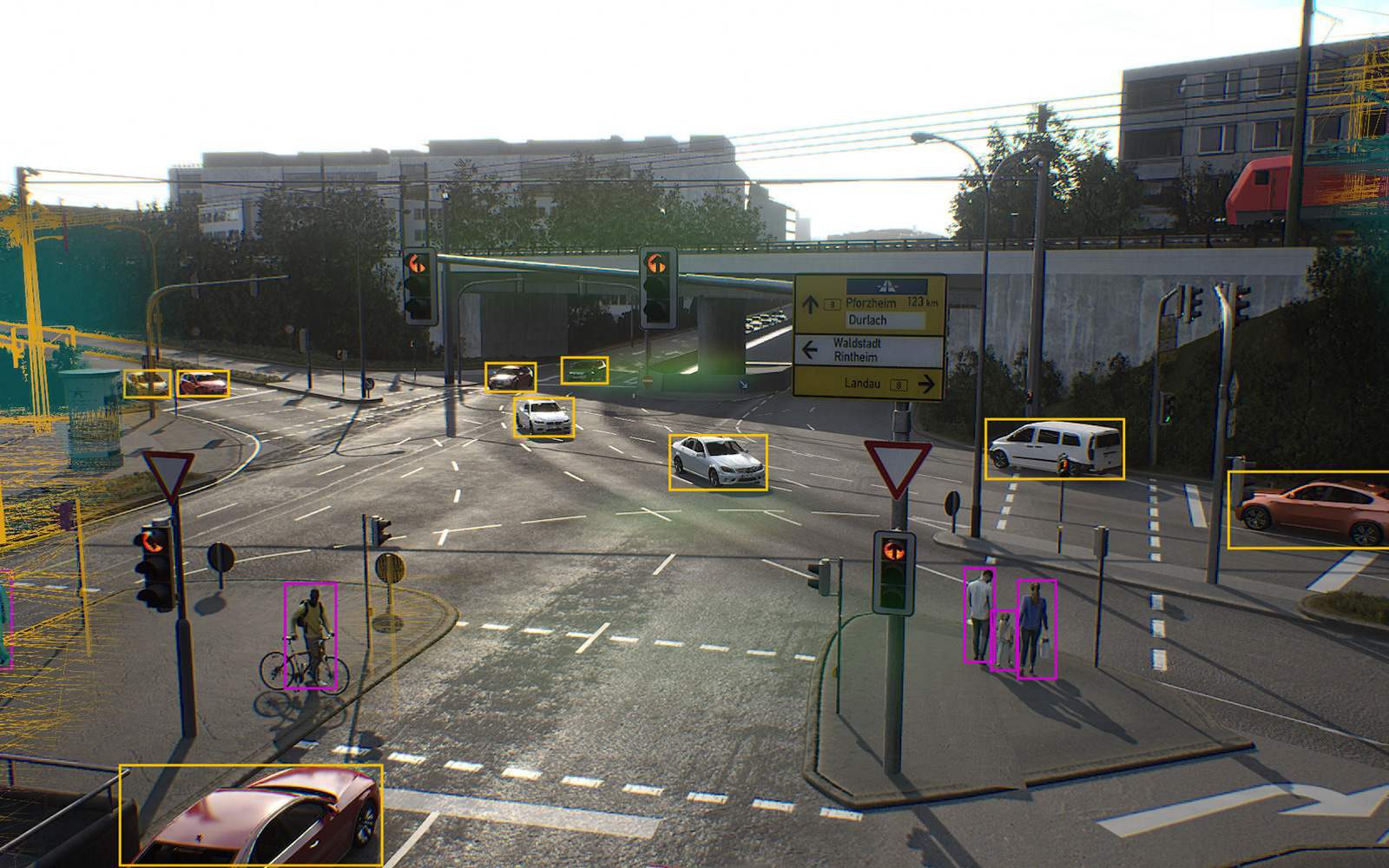
Individuelle Mobilität ist ein kritischer Faktor für den wirtschaftlichen Erfolg einer Gesellschaft, insbesondere die Vereinbarkeit von Familie und Beruf baut darauf auf.
Für komplexe und flexible Tagesabläufe wird das Verkehrsmodal Auto aktuell meist als alternativlos angesehen. Dies ist zum Teil ein Akzeptanz- bzw. Wahrnehmungsproblem, da alternative Modale und modalübergreifende Mobilität als wenig zuverlässig gelten. Aktuell findet Mobilitäts- und Routenplanung immer im Kontext eines primären Modals statt, lediglich für die letzte Meile werden teilweise alternative Modale eingeplant.
Im Vorhaben MobAPlan soll gezeigt werden, dass eine integrierte Planung von Tagesaktivitäten und den daraus hervorgehenden Mobilitätsbedarfen technisch machbar ist. Es soll ein Planungsassistent (MobAPlan) konzipiert und prototypisch implementiert werden, der Nutzer*innen bei der Planung der Tagesaktivitäten unter Berücksichtigung der individuellen Mobilitätspräferenzen sowie bei Gesundheitszielen unterstützt.

Intelligente Lösungen für den Transport von Menschen und Gütern für die Mobilität der Zukunft stellen einen Schwerpunkt der FZI-Forschung dar. Dazu entwickelt das FZI integrierte Mobilitätssysteme – von der Fahrzeugautomatisierung über die Anwendung von KI in Verkehrssystemen bis zur urbanen Mobilität und Logistik.

Das FZI entwickelt den ROS-Treiber für Universal Robots.

Deutsch-israelische Forschungsinitiative zur Digitalen Demokratie
KI in der Mobilität
Die Supercomputing-Plattform für hochautomatisierte Fahrzeuge

Cybersicherheit für den Mittelstand

Repositorium zur Datenverwaltung für pflegeunterstützende KI-Anwendungen

Innovation mit Cybersicherheit für KMU in Baden-Württemberg

Statische Hardware-/Softwareanalysen im Kontext skalierbarer Edge-Computing- Plattformen

Härtung eingebetteter RISC-V-Software mittels Codetransformationen

Automatisierte Integration von Avionik-Racks mit Hilfe von Künstlicher Intelligenz