DisCoBoard
Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation
Start: 07.2019
Ende: 06.2023
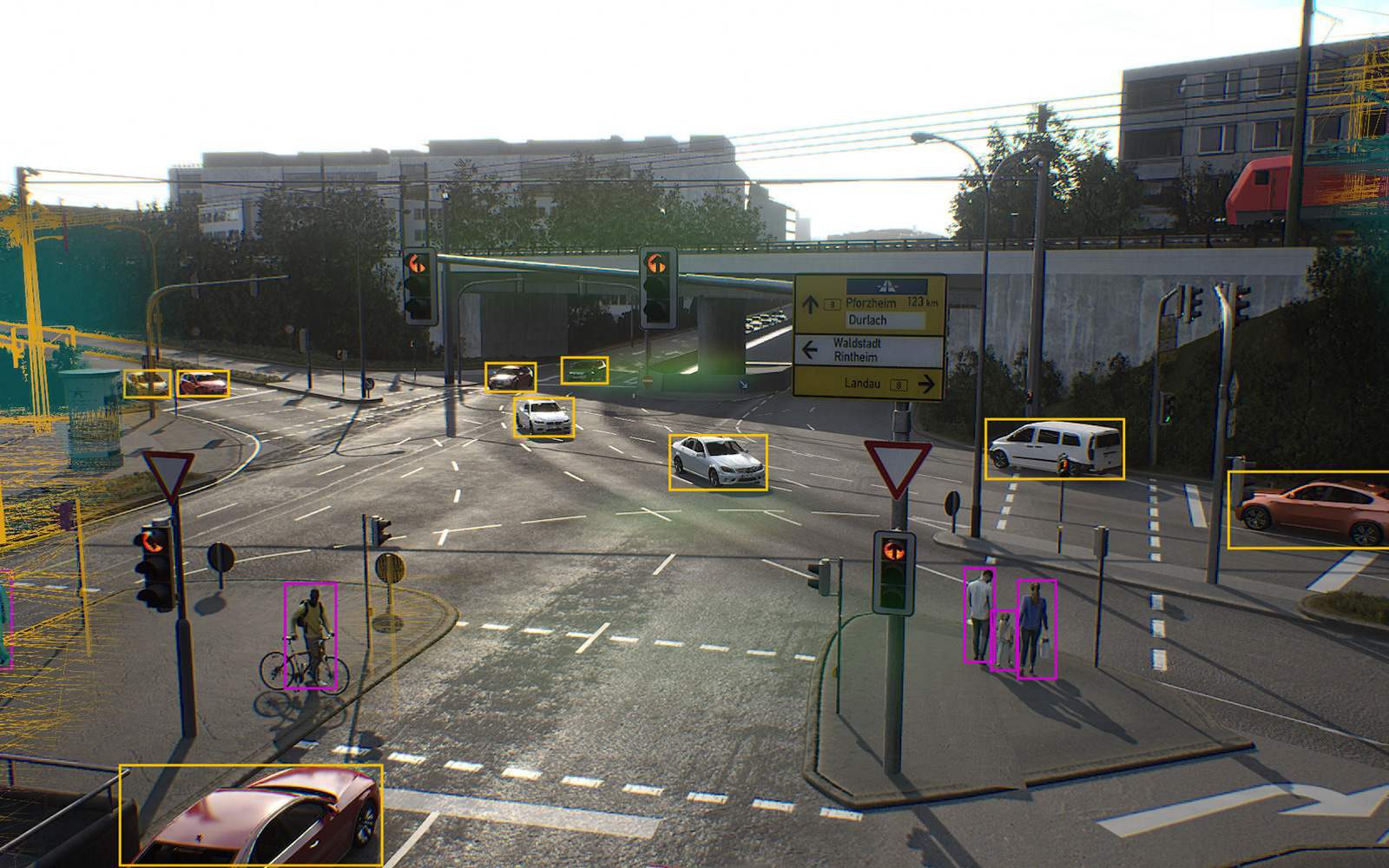
Das urbane Umfeld stellt eine der größten Herausforderungen für automatisierte Fahrzeuge durch die enorme Komplexität der Verkehrsszenarien und die hohe Diversität möglicher Verkehrsteilnehmer*innen dar. Diese Vielschichtigkeit und Diversität urbaner Verkehrsszenarien muss sicher und zuverlässig gemeistert werden, damit Menschen automatisierte Fahrzeuge im städtischen Umfeld einsetzen wollen.
Eine Schlüsselrolle für die Akzeptanz und die Einführung der neuen Technik fällt deshalb dem Nachweis der Sicherheit, der Verifikation und der Validierung automatisierter Fahrzeuge zu. Dieses Thema steht im Fokus des VVM Projekts, welches als Teil der PEGASUS-Projektfamilie die Arbeiten des PEGASUS Projekts in den Bereichen Testen und Absicherung aufnimmt. Es setzt sie mit dem Ziel fort, einen Sicherheitsnachweis für urbanes Fahren, speziell für den Anwendungsfall der urbanen Kreuzung, zu entwickeln.
Das FZI Forschungszentrum Informatik ist für das Teilprojekt 7 „Testvorgehen“ verantwortlich und beschäftigt sich mit der gesamtheitlichen Testmethodik für Level-4 und Level-5-Fahrzeuge. Im Fokus stehen Konzepte und Methoden eines durchgängigen Testvorgehens von Simulation bis hin zu Realtests für eine modulare Sicherheitsargumentation von automatisierten Fahrzeugen. Zudem werden zentrale Infrastrukturen in Form von Testfahrzeugen und Prüfständen am FZI aufgebaut beziehungsweise erweitert.

Intelligente Lösungen für den Transport von Menschen und Gütern für die Mobilität der Zukunft stellen einen Schwerpunkt der FZI-Forschung dar. Dazu entwickelt das FZI integrierte Mobilitätssysteme – von der Fahrzeugautomatisierung über die Anwendung von KI in Verkehrssystemen bis zur urbanen Mobilität und Logistik.
Förderhinweis:
Das Projekt VVMethoden wird vom Bundesministerium für Wirtschaft und Klimaschutz gefördert.

Projektpartner:
23 namhafte Partner aus Industrie und Forschung
Weitere Informationen unter www.vvm-projekt.de

Ein KI Dashboard, das junge Menschen stark macht gegen Desinformation

Automatisierte Modellierung und Analyse durch intelligente Netzalgorithmen und Graphenmethoden

Das FZI entwickelt den ROS-Treiber für Universal Robots.

Deutsch-Israelische Forschungsinitiative zur Digitalen Demokratie
Einsatz von Künstlicher Intelligenz in Verkehrssystemen
Die Supercomputing-Plattform für hochautomatisierte Fahrzeuge

Cybersicherheit für den Mittelstand

Repositorium zur Datenverwaltung für pflegeunterstützende KI-Anwendungen

Innovation mit Cybersicherheit für KMU in Baden-Württemberg

Statische Hardware-/Softwareanalysen im Kontext skalierbarer Edge-Computing- Plattformen